
Timezero Navigator V4: Navigationssoftware mit C-Map Vectorkarten und Radaranbindung
Seit Jahrzehnten bin ich mit Rasterkarten eines deutschen Herstellers auf dem Laptop gut gefahren. Was mich bewogen hat, Timezero Navigator (tz) in Betracht zu ziehen, war der Plan längere Einhandtörns zu unternehmen. Als zusätzliches Sicherheitsfeature wollte ich eine radarbasierte Alarmierungsfunktion in der Navigationssoftware haben, um ggf. bei einer gefährlichen Annäherung geweckt zu werden, falls mich unterwegs mal der Schlaf übermannen sollte ;-).
In Frage kamen seinerzeit die Produkte Timezero Navigator (tz) und Expedition. Den Ausschlag für tz gab der etwas günstigere Anschaffungspreis und die sehr einfache Anschlußmöglichkeit an das Furuno Radar DRS4D-NXT
Nachfolgend möchte ich einen kurzen Überblick und Erfahrungsbericht über die Navigationssoftware Timezero Navigator V4 geben. Die Software kann auf Windows Laptop oder PC installiert und betrieben werden. Ich habe diese Konfiguration bevorzugt, weil nicht nur die Funktionen der Software umfangreicher sind als auf einem Plotter sondern ein Computer neben der Navigation auch für vielfältige andere Funktionen genutzt werden kann. Die vom Hersteller angegebenen Systemvoraussetzungen sind absolut im Rahmen:
- Microsoft® Windows® 7 SP1, or Windows® 8.1 or Windows® 10
- CPU 1.5 GHz, 4GB of RAM
- Video Board: Minimum – Intel HD Graphic Chipset
- Recommended – Dedicated Video Board with 1 GB VRAM or Intel HD 4th generation or above
- Screen Resolution: 1024 x 600 or higher (1280 x 800 or above recommended)
- Hard Disk: 30 GB of free space
- USB or Serial Port for connecting instruments via NMEA0183, Actisense USB NGT-1 for connecting instruments via NMEA2000 or 100 Base-T Network Adapter for Furuno Ethernet Sensors
Zunächst habe ich die Timezero Navigationssoftware für 2 Jahre auf einem einfachen Laptop mit 17“ Display betrieben, dann auf einem fest installierten Bord PC mit 22“ Monitor in einer speziellen Marine Version und Grafikkarte. Im Cockpit dient ein via WLAN gekoppelter iPad als Außendisplay.
Der Datenaustausch mit GPS, Kompass, Autopilot, Wind, Log, Lot, AIS und Radar erfolgt über einen NMEA Miniplexer, der aller Formate (NMEA 0183 und 2000 bzw. Seatalk NG) bidirektional via USB mit dem Computer austauscht. Die Einrichtung der Datenschnittstelle für die Navigationssoftware erfolgt mit einem Wizzard quasi automatisch und ist einfach zu handhaben.
Ich habe mich für C-Map Vectorkarten entschieden, die im Vergleich zu Rasterkarten in der Detaildarstellung einen erheblichen Genauigkeitsgewinn aufweisen, gerade in Schärengewässern ein echtes Mehr an Sicherheit. Voraussetzung sind natürlich präzise GPS Positionsdaten.
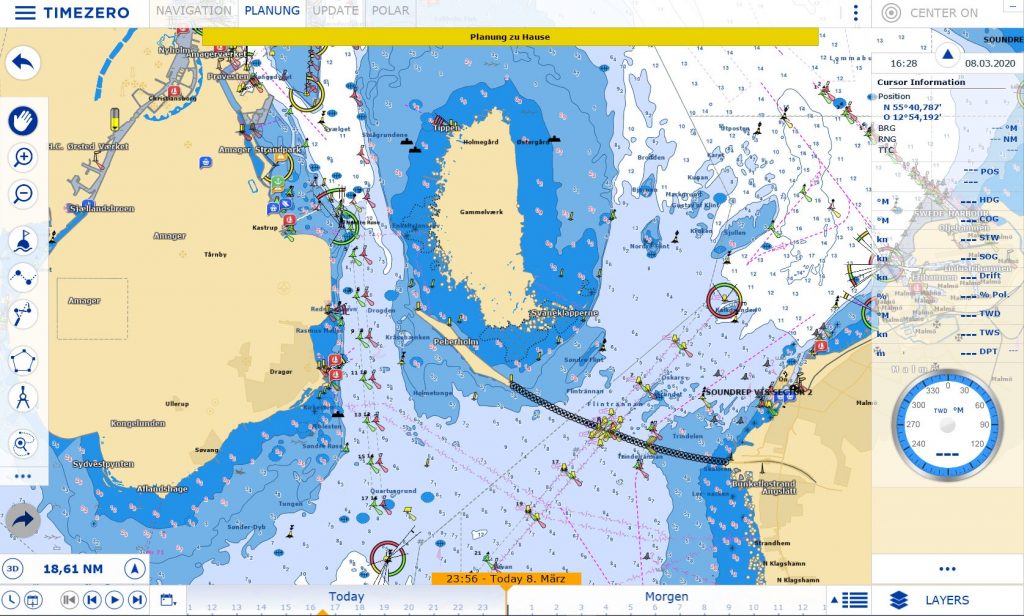
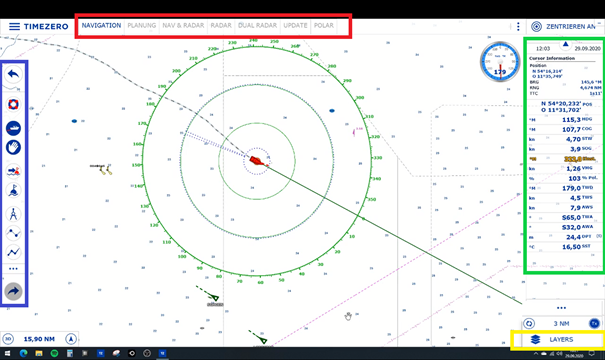
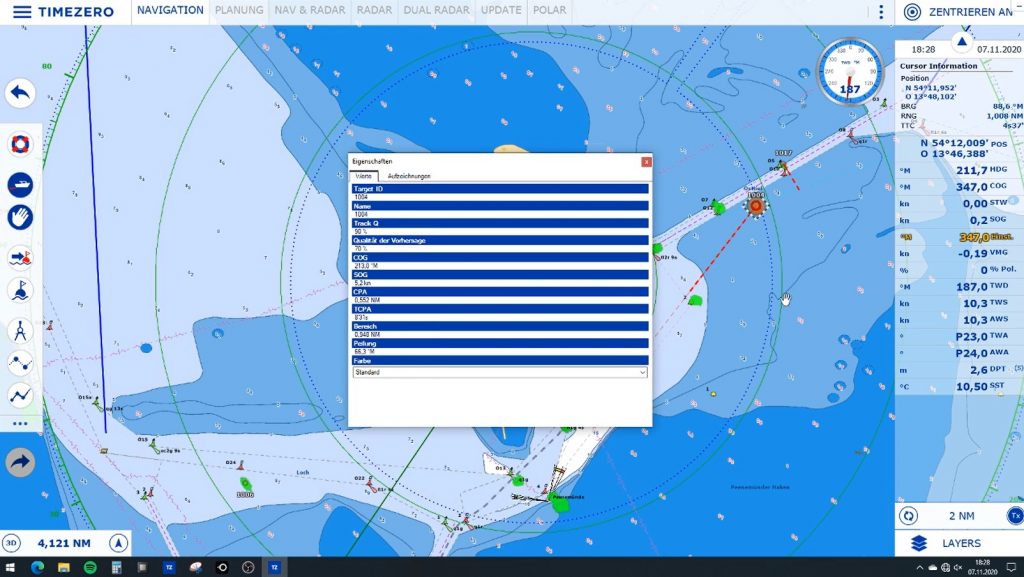
Die Benutzeroberfläche der Navigationssoftware ist ergonomisch und weitgehend intuitiv bedienbar. Zur besseren Verdeutlichung habe ich die nachfolgend aufgeführten Bereiche in der nachfolgenden Abbildung mit farbigen Rahmen und in folgenden Text farblich markiert. Zwischen den Fenstern für verschiedene Arbeitsumfelder bzw. –kontexte (z. B. Navigation, Planung, Radar, Update, …) schaltet man mit einem Mausklick hin und her. Ein frei konfigurierbares Datenfenster zeigt die gewünschten Navigationsdaten (z. B. SOG, COG, STW, HDG, DPT, A- bzw. TWA, A- bzw. TWS, VMG, aber auch Schiffs- und Cursorposition, Cursorpeilung und –distanz zur Schiffsposition, usw …). Eine ebenfalls konfigurierbare Funktionsleiste erlaubt den direkten Aufruf von wichtigen Funktionen (z. B. MOB, Distanzmessung, Routenplanung, Wetterrouting, … ) mit einem Klick. Ein smartes Layerkonzept ermöglicht die schnelle Ein- bzw. Umstellung der gewünschten Kartensicht (z. B. Tag-, Dämmerungs- und Nachtansicht, Wetter- und Gezeitendaten, Seezeichenbezeichner, Lichtsektoren und vieles Andere mehr ein- oder ausblenden). Ein einfacher Zugang und die Teilnahme an der ActiveCaptain Plattform von Garnim ist übrigens auch vorhanden und die „gerateten“ Locations werden in der Karte angezeigt.
Auf alle interessanten Funktionen und Einstellungsmöglichkeiten einzugehen, würde den Rahmen sprengen. Ich beschränke mich im Folgenden deshalb auf die Schwerpunkte Wetter und Wetterrouting sowie Darstellung und Handhabung von Radar mit einem Furuno DRS4D-NXT. Nachdem ich bei meiner Recherche und Auswahlentscheidung vor einigen Jahren mehrere Monate und eine kommerzielle Schulung gebraucht habe, um diese für mich relevanten Informationen zusammenzutragen, habe ich gedacht, es ist vielleicht hilfreich genau diese Aspekte mal für andere Interessenten quasi auf einen Blick zusammenzustellen.
Wetter:
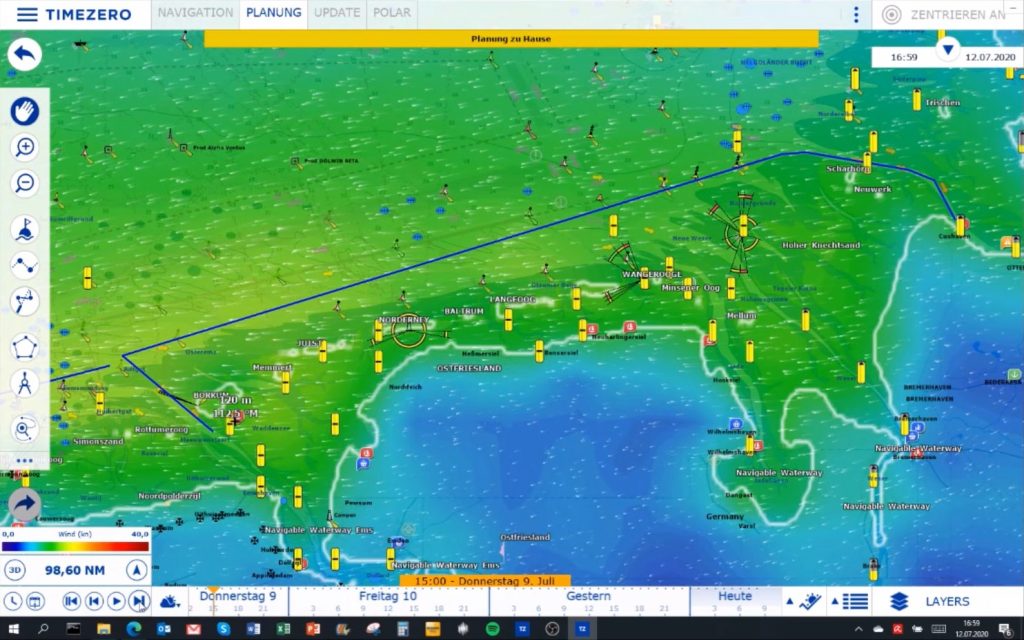
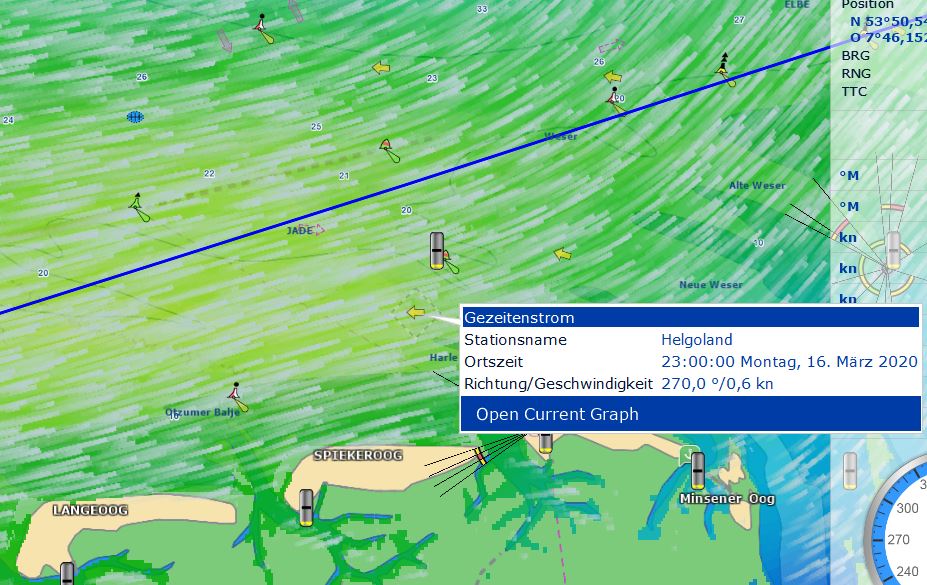
Das Programm bietet eine sehr anschauliche Darstellung der Wettervorhersage auf Basis von Gribdaten unterschiedlicher Quellen und Wettermodelle (in der Premium Variante mit Zugang zu GFS NOAA, Arpege, Arome Meteo France und DWD). Der Download der Wetterdaten ist komfortabel und einfach zu handhaben, Internetzugang natürlich vorausgesetzt. Dabei werden Windrichtung wahlweise mit Pfeilen oder als Partikelfluss, und Windstärke als Federn oder flächige Einfärbung dargestellt, außerdem Strom, Wellenhöhe, Höhe der Gezeit an bestimmten Orten und natürlich Luftdruck, auch als Isobaren sowie Niederschlag und Bewölkung. Die zeitliche und räumliche Auflösung der Wetterdaten ist abhängig vom gewählten Wettermodell und Datenlieferanten.
Entweder standortbezogen oder bezogen auf eine geplante Route kann außerdem mit einem Mausklick ein sehr übersichtliches Meteogram angezeigt werden.
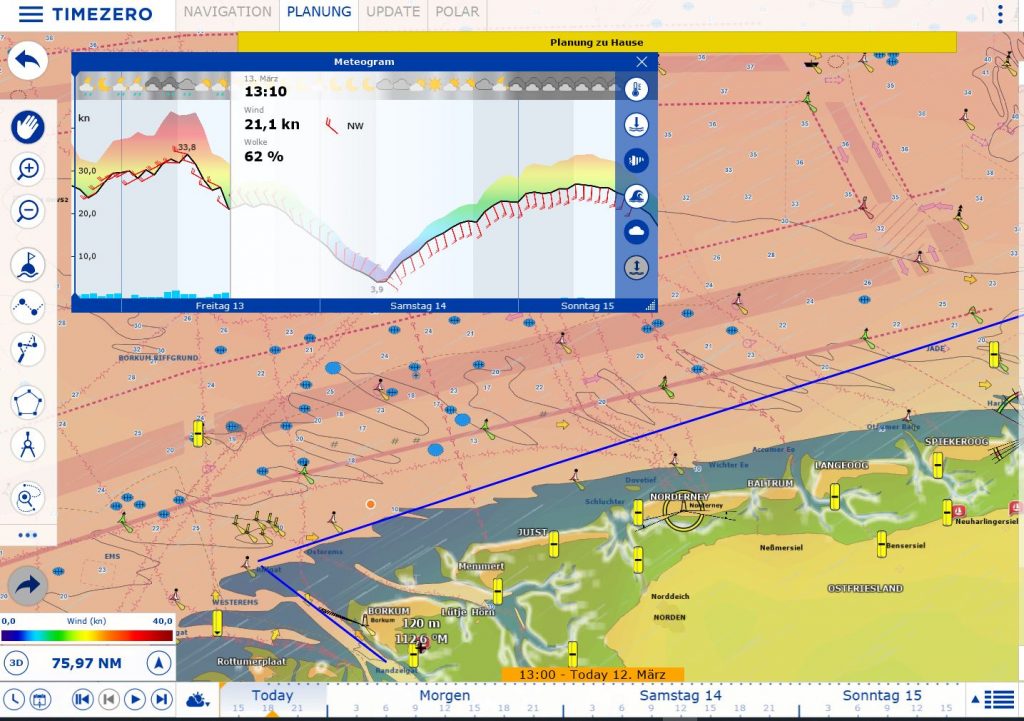
Im unteren Bildschirmbereich gibt es eine Zeitleiste und man kann dann die Wettersimulation automatisch über die Zeit laufen lassen oder sich im Stundentakt durchhangeln und so die vorhergesagten Wetterbedingungen zum jeweiligen Zeitpunkt betrachten.
Die gezeitenabhängigen Tidenströme sind hinterlegt und können sichtbar gemacht werden, ebenso die in den herunter geladenen Gribdaten enthaltenen wetterbedingten Strömungsdaten.
Das Wetterrouting dient dem Ziel, die optimale Route bezogen auf die vorhergesagten Wetterbedingungen im geplanten Zeitrahmen auf dem Weg zwischen Start und Ziel und unter Berücksichtigung der bekannten Möglichkeiten des Schiffes zu bestimmen.
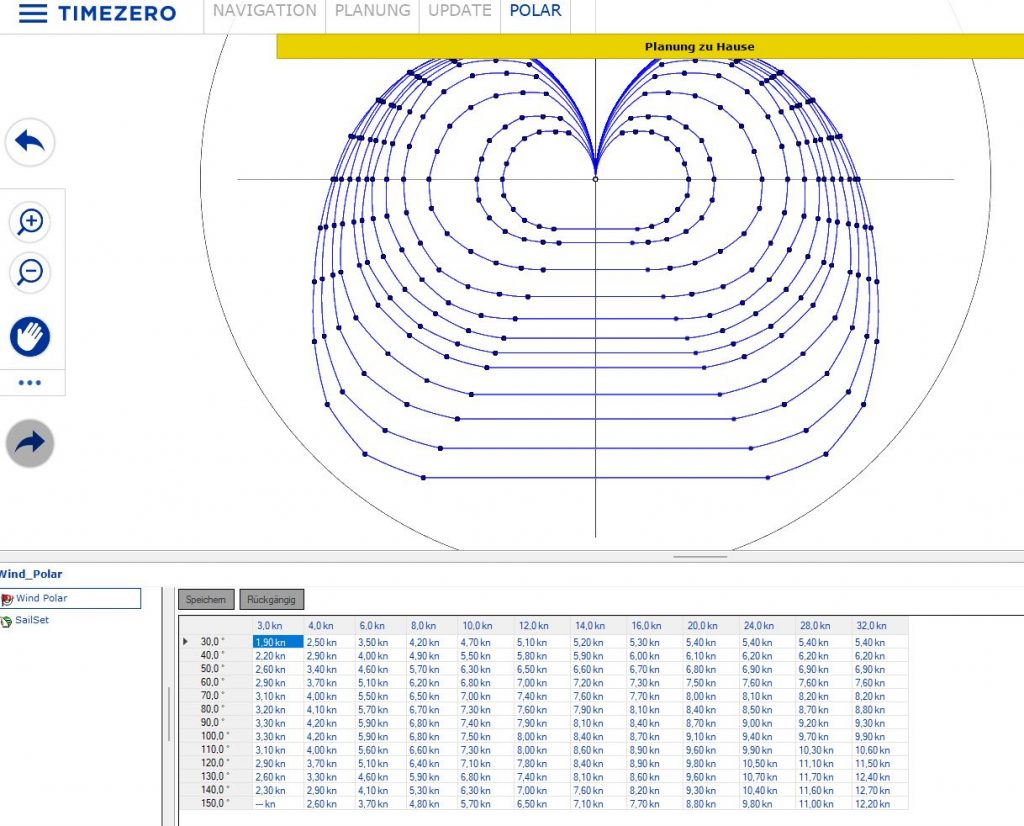
Dem Wetterrouting liegt ein individuell hinterlegbares Polardiagramm zugrunde, welches für das eigene Schiff die theoretisch und idealerweise erreichbaren Werte für Geschwindigkeit durchs Wasser (STW) in Abhängigkeit von Windeinfallswinkel und –geschwindigkeit sowie das jeweils optimale Segelstell darstellt. Eine sehr große Anzahl Polardiagramme für die verbreiteten Bootsmodelle stehen hier im System „out of the box“ zur Verfügung und können bei Bedarf auch noch an das eigene Schiff angepasst werden.
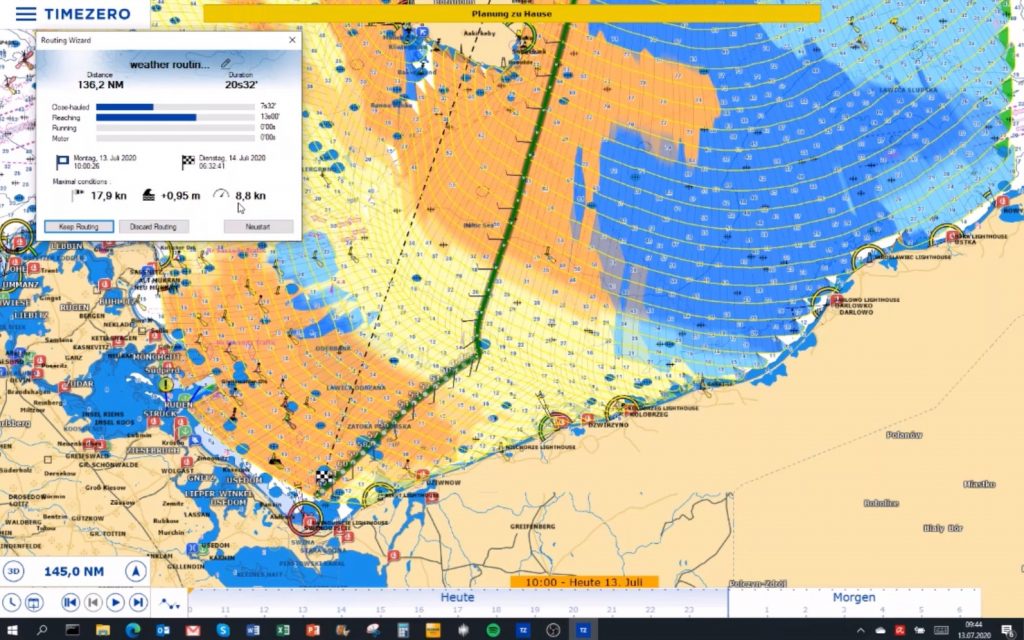
Das Wetterrouting kann entweder bezogen auf eine bereits geplante Route oder durch Markierung eines Start- und Zielpunktes gestartet werden. Der Algorithmus ermittelt dann bezogen auf den angegeben Startzeitpunkt, die vorliegenden Grib Daten und das Polardiagramm die schnellste Route zum angegeben Ziel. Dabei werden auch festgelegte Rahmenbedingungen wie Mindesttiefe, maximale Wellenhöhe und Windstärke berücksichtigt. Im Ergebnis wird in der Karte eine berechnete optimale Route mit DTT und ETA vorgeschlagen wobei für die einzelnen Abschnitte Windrichtung und –stärke sowie Segelstell gezeigt werden.
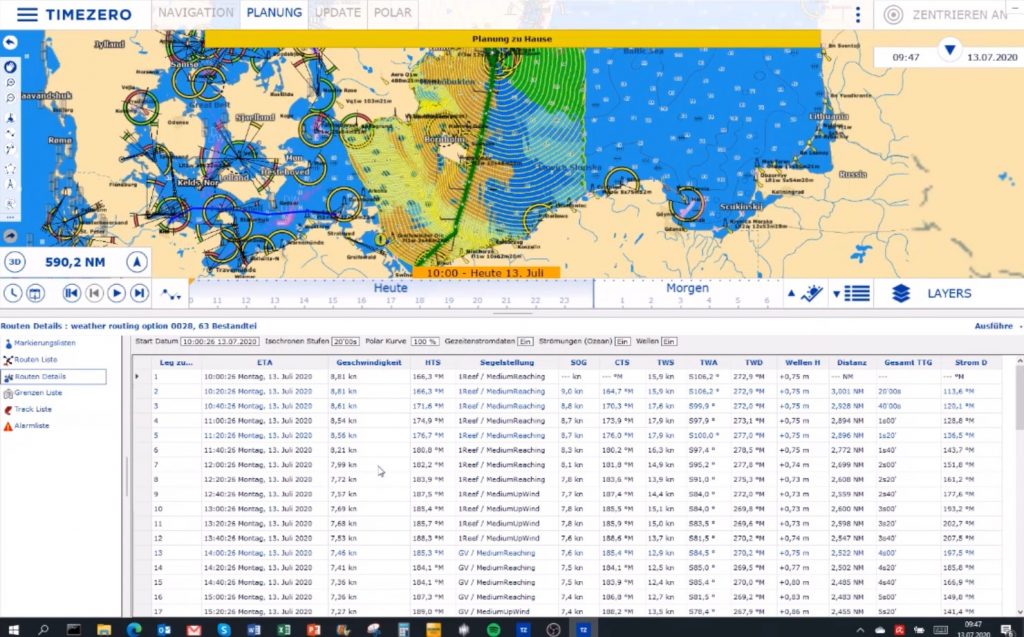
Die Abschnitte lassen sich auch als detaillierte Liste darstellen, aus der dann auch diverse andere Werte (z. B. AWA, AWS, TWA, TWS, SOG, Current, Wellenhöhe und Richtung, etc.) ersichtlich sind.
Es macht wirklich Spaß, sich die Wettervorhersage in dieser Form darstellen zu lassen und ganz besonders auch, sich theoretisch ideale Routen berechnen zu lassen. Die Funktionen sind weitgehend selbsterklärend und einfach zu bedienen. Man darf sich allerdings auf die Verführungskraft des scheinbar genauen Wetterroutings nicht blind verlassen. Das System berücksichtigt natürlich schon kleinste vorhergesagte Winddreher und schlägt dann entsprechende Kurse in der Route vor. In der Praxis weichen aber selbst tagesaktuelle Gribdaten zeitlich und räumlich nicht unerheblich von der tatsächlichen Windrichtung ab, so dass man den Kurs am Ende meistens doch an die konkreten Gegebenheiten anpassen muss, die man vorfindet. Leider werden die Gezeitenströme beim Routing nur berücksichtigt, wenn man auch den Layer für die hochauflösende Gezeitenstromdarstellung für das entsprechende Gebiet gekauft hat. Trotzdem ist diese Art der Planung hilfreich, weil sie wertvolle Anregungen zur Kursoptimierung im gesamten Streckenverlauf geben kann. Es ist eben nicht immer einfach, bei der Betrachtung der Wettervorhersage über die Zeit und den gesamten Streckenverlauf die relevanten vorhergesagten Windänderungen und Strömungsverhältnisse für die Planung im Auge zu behalten. Das kann die Software gut und zumindest besser als ich 😉 .
Wünschenswert wäre eine vektorbasierte Darstellung der aus Wetter und Gezeiten resultierenden Strömungsverhältnisse, so wie es bspw. auf der norwegischen Wetterseite www.yr.no möglich ist.
Hier noch 2 Video Beispiele für das Wetterrouting:
Kopplung mit dem Furuno Radar DRS4D-NXT
Im Winter 19/20 habe ich ein Furuno DRS4D-NXT Radar installiert (nicht zu verwechseln mit dem DRS4W, welches in der Yacht 2/2020 getestet wurde). Neben dem Sicherheitsgewinn, den ein Radar bei schlechter Sicht und nachts bringt, geht es mir vor allem auch darum, beim Einhandsegeln – und temporär ohne Ausguck – bei Annäherung von Schiffen oder Objekten frühzeitig ein Warnsignal zu bekommen, um rechtzeitig reagieren zu können.
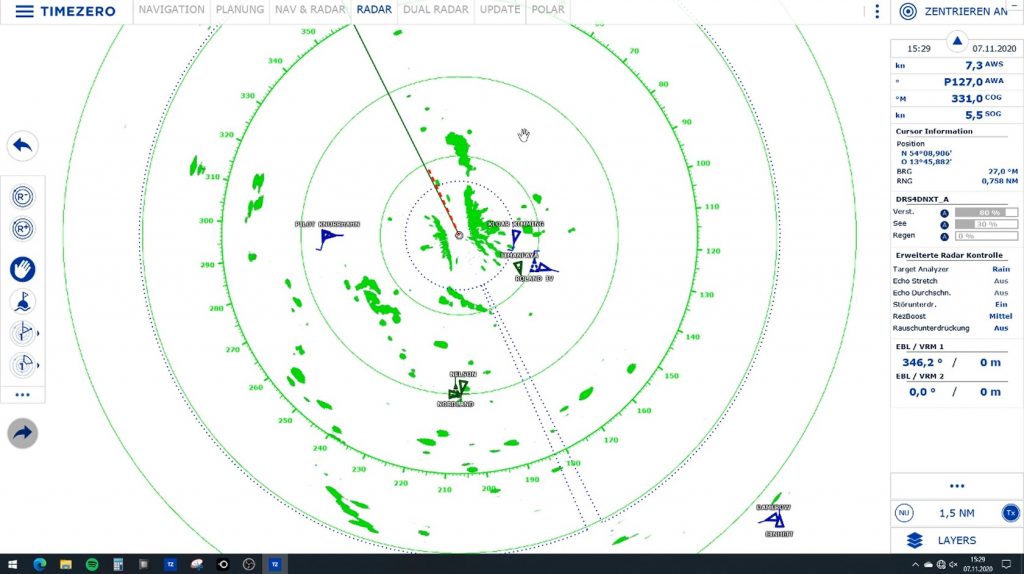
Neben diesen Sicherheitsaspekten überzeugen mich bei dem Furuno DRS4D-NXT der gegenüber herkömmlichen Yachtradargeräten sehr geringe Stromverbrauch, sehr viel geringere Radarstrahlen Emissionen, höhere Zielauflösung und sowie praktisch keine Aufwärmzeit nach dem Start. Diese Vorteile ergeben sich, weil das Gerät nicht mit einem herkömmlichen Magnetron, sondern mit einer „Solid State“ Antenne arbeitet und ein proprietäres X-Band Pulskompressionsverfahren zum Einsatz kommt. Mit Hilfe der auf Doppler Effekt Technologie basierenden Target Analyser Funktion ist zum Beispiel eine automatische Erkennung und farbliche Unterscheidung von sich nähernden Zielen möglich. Innerhalb eines Radius von bis zu 12 sm werden Radarziele, die sich nähern, im Target Analyser Modus rot hervorgehoben, die übrigen grün angezeigt. Die automatische Zielerfassung- und Verfolgung (ARPA) inkl. grafischer Vektordarstellung und Anzeige von CPA und TCPA ist ebenfalls gegeben.

Interessant fand ich nicht zuletzt auch die Kompatibilität und das Zusammenspiel mit der Timezero Navigator Software, die ich im Einsatz habe und die einfache Anbindung der Radarantenne an den Bord PC. Die Datenverbindung an den PC erfolgt über Ethernet. Die 24“ Radom Antenne habe ich an einem Scanstrut Radarmast mit halbkardanischer Aufhängung montiert, was denkbar einfach und schnell ging, weil alle Teile auf einander abgestimmt sind und gut zusammen passen. Das Verlegen des 15 m Anschlusskabels vom Radom bis zum PC und Bordstromanschluss war aufgrund der an Bord etwas eingeschränkten Möglichkeiten schon etwas schwieriger.
Das Kabel ist vorkonfektioniert und umfasst sowohl Ethernet Verbindung als auch die Stromversorgung in einer gemeinsamen Ummantelung. Man muss es also gleich in der benötigten Länge bestellen. Eine halbkardanische Aufhängung war mir wichtig, damit das Radar beim Segeln mit Lage in den seitlichen Sektoren nicht „blind“ wird. Zwar beträgt der vertikale Abstrahlwinkel der Antenne 25 Grad, das ist aber bei eine dauerhaften Lage beim Segeln von mehr als 12,5 Grad schon nicht mehr ausreichend um im Bereich 90 Grad querab Radarziele noch sicher zu erkennen. Und 20 Grad Lage über eine längere Zeit sind beim Segeln keine Seltenheit.
Auch der technische Anschluss an den PC via Ethernetkabel ist denkbar einfach. Die Stromversorgung erfolgt aus dem 12 V Bordnetz. Für die Nutzung im Timezero Navigator muss dann nur noch eine feste IP Adresse für den LAN Adapter des PC vergeben werden und nach dem Start des Timezero Navigators einmal die Schnittstellenprüfung bzw. –erkennung durchlaufen werden. Danach stehen die Radarfunktionen in vollem Umfang in der elektronischen Seekarte Timezero Navigator zur Verfügung. Nach dem Einschalten der Stromversorgung steht das Radargerät auf Standby und ist mit einem Klick auf die entsprechende Schaltfläche im Navigator gestartet und beginnt dann auch sofort zu senden und das Ergebnis auf dem Bildschirm aufzuzeichnen.
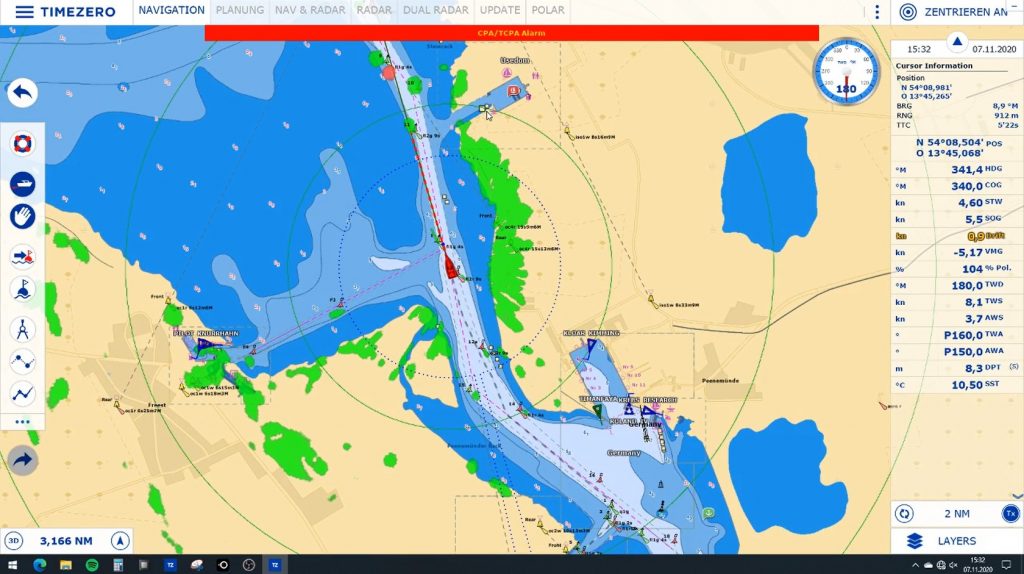
Neben der „Overlay“ – Darstellung, in der das Radarbild über die Seekarte gelegt wird,
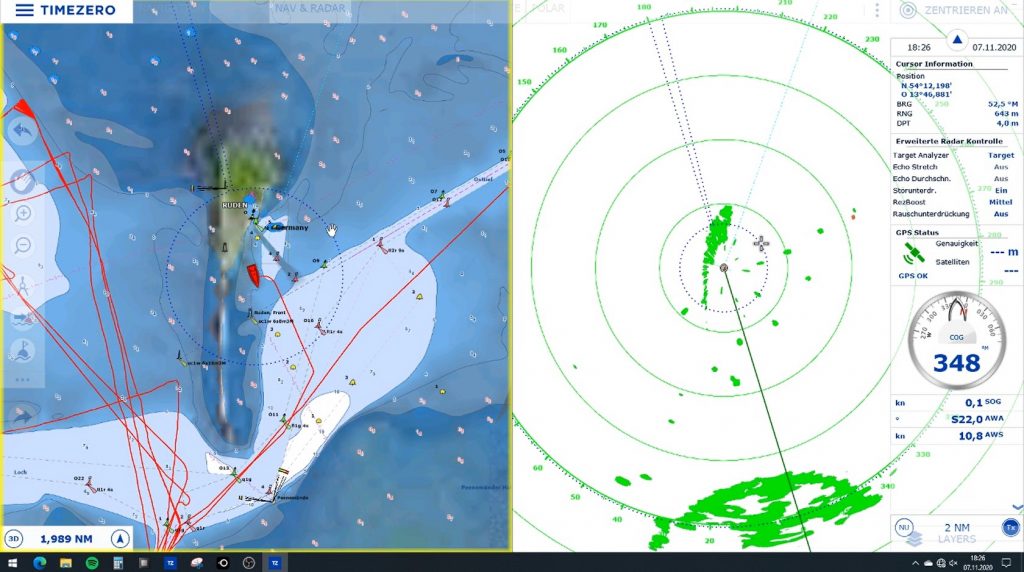
gibt es auch einen parallelen Modus, in dem das Radarbild und die Seekarte synchron in 2 nebeneinander geöffneten Fenstern dargestellt werden, wobei die Bewegungen der Maus in beiden Fenstern synchron erfolgen und AIS Ziele in beiden Fenstern gleichzeitig dargestellt werden. Stellt man den Mauszeiger auf ein Ziel im Radarbild, steht er im Seekartenfenster an der gleichen Stelle und falls sich dort ein Seezeichen oder AIS Ziel oder anderes Objekt befindet, hat man sofort Klarheit. Das kann bei der Interpretation des Radarbildes hilfreich sein, insbesondere wenn im „Overlay“ – Modus sehr viele Radarechos dargestellt und dabei wichtige Objekte in der digitalen Karte durch Radarreflektionen überlagert und so Informationen verdeckt werden.
Die Target Analyser Funktion erkennt automatisch sich nähernde Radarziele und stellt diese gegenüber unkritischen Radarzielen farblich heraus. Sehr hilfreich finde ich auch die ARPA Funktion. Im „Auto Acquire“ Modus erkennt und verfolgt das Furuno DRS4D-NXT Doppler Effekt basiert automatisch ARPA Ziele. Dabei werden die Ziele mit eigenem Vektor, CPA und TCPA angezeigt und verfolgt, die sich mit einer Geschwindigkeit von mehr als 2 Knoten (einstellbar) dem eigenen Schiffsort nähern. Für Ziele innerhalb eine frei einstellbaren Guard Zone kann auch ein Alarm aktiviert werden, der bei Unterschreitung eines festzulegenden CPA automatisch ausgelöst wird. Diese Alarmierungsfunktion ist sehr hilfreich beim Einhandsegeln und für mich persönlich der wichtigste Grund, warum ich das Furuno DRS4D-NXT angeschafft habe.
Große Objekte wie Berufsschiffe werden – je nach Antennenhöhe – in einer Entfernung von 6 – 12 Seemeilen, kleinere Yachten mit Alumast oder Boote mit Radarreflektor in einer Entfernung von 1,5 – 2 Seemeilen sicher als ARPA Ziele erkannt und getrackt.
Es ist aber natürlich auch jederzeit möglich, sich mit der rechten Maustaste über das Kontextmenü alle verfügbaren Daten über das Radarziel (wie z. B. COG und SOG) anzeigen zu lassen.
Die nachfolgend kurz vorgestellten Radaroptionen und Einstellmöglichkeiten sind vielfältig und im Prinzip erstmal sinnvoll voreingestellt.
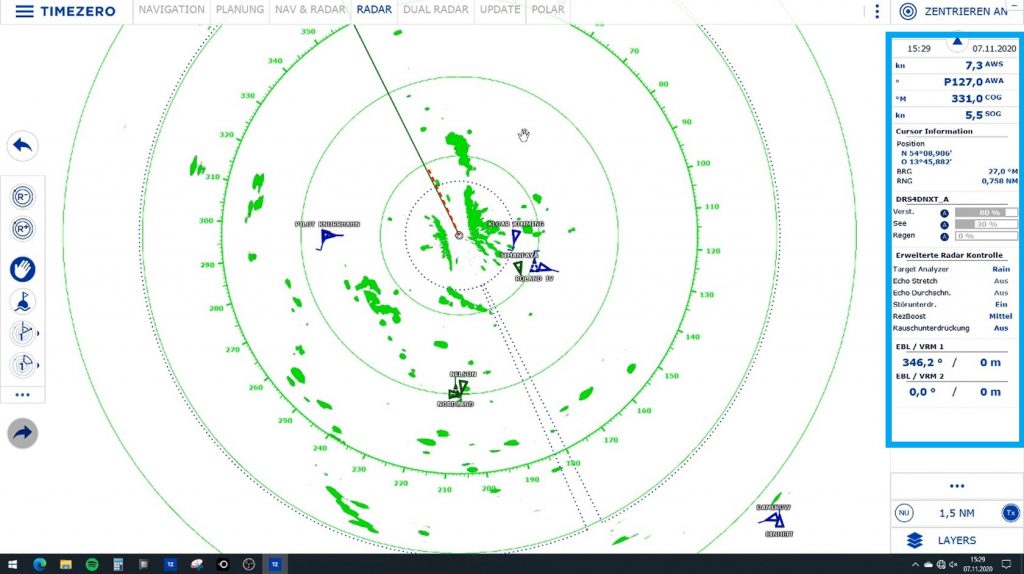
Wichtige Einstellungen werden – natürlich abhängig vom verwendeten Gerät, in meinem Fall also das Furuno DRS4D-NXT – auch automatisch an die jeweilige Situation angepasst, z. B. Gain / Sea (STC) / Rain (FTC), mit guten Ergebnissen wie ich finde. Im „Rain“ Modus können die Regenechos andersfarbig dargestellt als die darin möglicherweise verborgenen Radarziele. Diese Einstellung kann so angepasst werden, dass reguläre Radarziele innerhalb des Regenechos klar unterscheidbar aufscheinen. Anzeige und manuelle Einstellung dieser Funktionen und Parameter erfolgt über das Radar Control Panel des Timezero Navigators (im Bild oben auf der rechten Seite rot umrandet). Eine manuelle Einstellung macht aber vermutlich nur Sinn
- in extremen Wettersituationen (Starkregen, Seegang) oder
- wenn andere Parameter manuell geändert werden, die ihrerseits eine Wechselwirkung mit Rain & Sea Clutter haben, wie etwa „Echo Stretch“.
Dafür ist dann allerdings auch entsprechende Fachkenntnis beim Anwender vorausgesetzt.
Die optimale Radarimpulslänge ist für die verfügbaren Ranges bereits vorbelegt, kann aber über die Funktion „Pulse Length“ für das eingestellte Range geändert werden, um beispielsweise gezielt weiter entfernte Ziele besser darzustellen (Impulslänge erhöhen) oder Nahziele klarer voneinander abzugrenzen (Impulslänge vermindern).
Mit der Funktion „Echo Trail“ hinterlassen die Radarziele eine Spur auf dem Bildschirm. Die Funktion macht allerdings nur im „True“ – Modus Sinn, weil im „Relative“ – Modus alle Ziele eine Spur hinterlassen, die sich relativ zum Schiff bewegen, also auch Land und festinstallierte Seezeichen. Die Funktion setzt einen angeschlossenen „Heading Sensor“ voraus, der das System mit den Kursdaten versorgt.
Wenn das Furuno DRS4D-NXT angebunden ist, steht die Funktion „Target Analyzer“ zur Verfügung. Ist diese eingeschaltet, werden Radarziele, die sich dem eigenen Schiff nähern, rot angezeigt, während alle anderen Ziele grün dargestellt werden. Die Funktion arbeitet unabhängig von der Geschwindigkeit der Ziele. Die Farbe wechselt dynamisch, wenn sich die Annäherungslage ändert.
Ebenfalls nur mit dem Furuno DRS4D-NXT arbeitet die Funktion „RezBoost“, die eine Verbesserung der horizontalen Radarstrahlauflösung bis zum Faktor 2 ermöglicht. Nebenwirkung kann sein, dass Radarziele nach dem Einschalten der Funktion kleiner erscheinen.
Die Funktion „Echo Stretch“ streckt Radarechos und macht so kleine Ziele besser erkennbar. Diese Wirkung erstreckt sich allerdings auch auf Sea und Rain Clutter, insofern sollte die Unterdrückung für diese entsprechend hoch eingestellt sein.
Die Funktion „Echo Averaging“ bildet einen Durchschnitt mehrerer Bildfolgen ab, was störende Bildeffekte wirksam unterdrückt. Nachteil ist, dass sich bewegende Ziele schwächer dargestellt werden.
Die Farben des Radarechos sind zwischen rot, grün oder gelb wählbar, auch die Transparenz der Echodarstellung im Overlaymodus kann eingestellt werden. Daneben gibt es noch die Funktionen „Noise Rejection“, „Interference Rejection“ und „Bird Mode“, die ich hier nicht näher beschreibe.
Mein folgendes Fazit ist insofern sehr subjektiv, als ich bisher nur ältere Radarmodelle kennengelernt habe, die mit separaten Schirm und meist auch einer schlechten Auflösung ein monochromes Bild geliefert haben. Allein schon die Interpretation des Bildes ist bei solchen Geräten für den Anfänger eine potenzielle Überforderung. Ein einzelnes Ziel, das mit unveränderter Peilung näher kommt, ist ja noch relativ einfach zu erkennen und zu interpretieren. Aber schon die radargestützte Annäherung an eine Hafeneinfahrt bei Nebel – also aufgrund der Radarechos – ist nur mit großer Erfahrung und Expertise zu meistern.
Ausgehend davon ist meine Begeisterung über diese neuen Möglichkeiten des Furuno DRS4D-NXT groß. Endlich ist Radar auch für den normalen Freizeitskipper problemlos zu meistern und obendrein noch ausgesprochen leistungsfähig. Abgesehen von der mechanischen Installation, für die man natürlich ein gewisses Händchen haben muss, ist der Anschluss und die Handhabung wirklich einfach und sicher und im Zusammenspiel mit dem Timezero Navigator auch weitgehend selbsterklärend. Das Online Handbuch erklärt sehr anschaulich und ausführlich die Features und Funktionen, allerdings nur auf Englisch.
Generell liefert ein Radar bei einem Tagestörn und guter Sicht eigentlich eher keinen zusätzlichen Mehrwert. Außer vielleicht ein gewisses Sicherheitsgefühl, als dass man sich gerüstet weiß für den Fall eines schnell und überraschend aufziehenden Seenebels. Mehrwert liefert das Radar aber ganz klar bei Nebel und schlechter Sicht und natürlich nachts, wenn mit dem bloßen Auge Gefahren nicht erkennbar sind. Wer einmal in „pottendickem“ Nebel auf See ohne Radar überrascht worden ist, weiß was ich meine. Wenn das Radar dann auch noch quasi selbsterklärend und entsprechend einfach zu handhaben und nahtlos integriert in die elektronische Seekarte ist, dann fängt es an Spaß zu machen. Und dann noch als Sahnehäubchen: die Möglichkeit auf längeren Törns über offenes Wasser, sich bei Annäherung von Gefahren vom System warnen lassen zu können.
Nach einer Corona bedingt leider etwas verkürzten Saison mit Törns von Vorpommern im Frühsommer nach Smögen und im Herbst nach Kiel und wieder zurück bin ich auch von der Betriebs- und Funktionssicherheit des Gerätes und der Software überzeugt. Ich hatte nicht einen einzigen Ausfall oder Funktionsfehler. Pluspunkte sind der gegenüber herkömmlichen Yachtradargeräten der sehr geringe Stromverbrauch, die sehr viel geringeren Radar Emissionen, eine höhere Zielauflösung und die instant Verfügbarkeit des Radarbildes nach dem Start des Gerätes, also sowie praktisch keine Aufwärmzeit. Diese Vorteile ergeben sich daraus, dass ein proprietäres X-Band Pulskompressions- und Solid State Verfahren zum Einsatz kommen. Die auf Doppler Effekt Technologie basierenden Target Analyser Funktion mit automatischer Erkennung und farblicher Unterscheidung von sich nähernden Zielen ist schon eine feine Sache. Die automatische Zielerfassung- und Verfolgung (ARPA) inkl. grafischer Vektordarstellung und Anzeige von CPA und TCPA ebenfalls.
Handbuch und Support in englisch. Reaktionszeit bei Supportanfragen für die Handhabung im Stundenbereich, bisher immer unter 24 Stunden.
Danke für den Praxisbericht. Als Entscheidungshilfe pro Radar sehr gut.